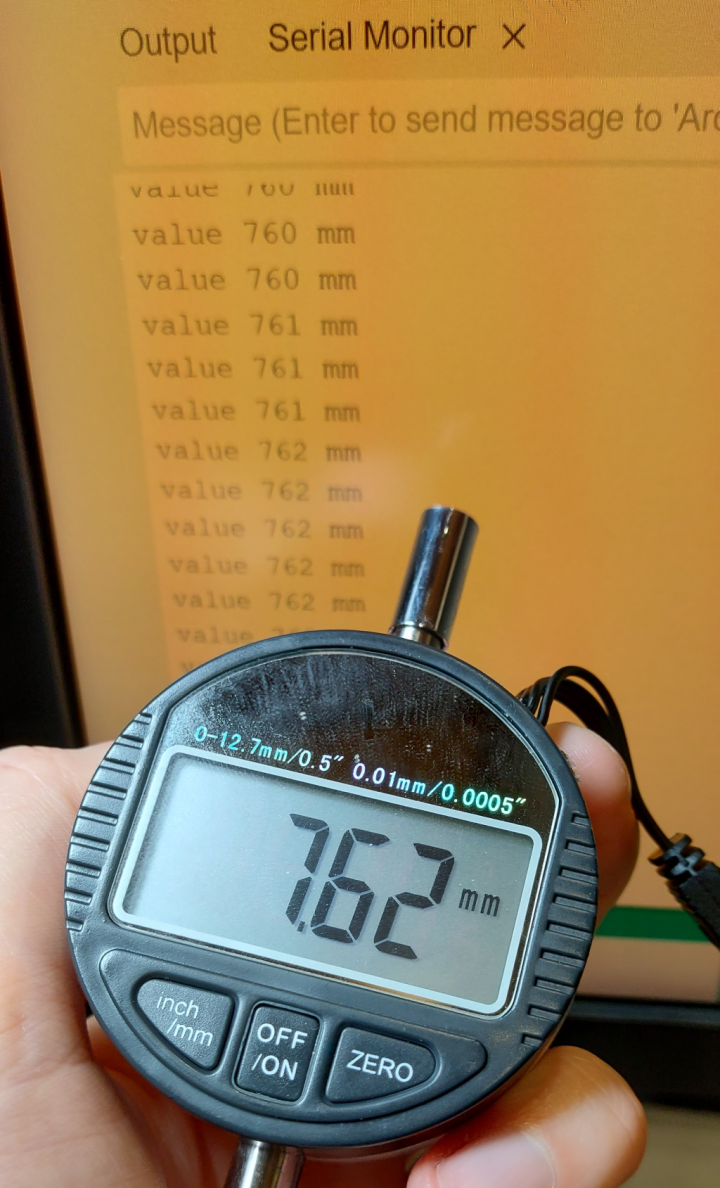
In this post, I’ll show you how to read data from one of those generic Digital Dial Indicators using an Arduino.
I wanted to map out the bed level of my 3D printer so I thought I could use this digital dial indicator I bought many years ago. I remembered it had a digital interface I could use to extract the data.
I soldered the wires directly to the pads however if you want a proper connector you can 3D print it from here.
Arduino
Dial
Gnd
Gnd
Analog 0 (A0)
Data
Analog 1 (A)
Clock
Code
Because the signals are lower in voltage that the Arduino digital pins can detect you would need a small additional amplifier circuit with a transistor to increase the voltage.